Automating Bagging for Efficiency
Increased Efficiency with Automated Bagging
We crafted a proposal for a customer seeking to automate their manual bagging process. Their current method of bagging small clamps post-assembly was labor-intensive and prone to errors. Staff had to identify and sort mixed-size clamps, leading to inefficiencies and an increased risk of mistakes. Automation was suggested to ensure correct part numbers were bagged and to minimize injury risks from handling small parts. They wanted to also free up staff to do tasks that better increased production on the line.
Challenges
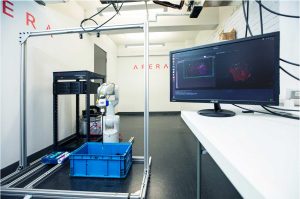
Some of the challenges our team faced with automating this process included limited space, which required the use of a collaborative robot to avoid the need for a safety cell. Additionally, the high reflectivity of the metallic parts necessitated the advanced 4-D machine vision capabilities of the Apera system to accurately identify each part and prevent false readings. Furthermore, clamps often stuck together, leading to incorrect quantities being bagged and disrupting the tracking of incoming SKUs from production.
Automated System Solution
To address the space constraints, we implemented a Universal Robots collaborative robot, eliminating the need for a safety cell. To handle the high reflectivity of the parts, we chose Apera AI’s Apera Vue system for its advanced machine vision capabilities. The Apera 4-D vision system managed reflective surfaces effectively. A secondary check ensured only one part was picked before bagging. For double picks, the robot used a shaking movement to separate parts; if that failed, it would drop and re-pick the part.
Conclusion
By incorporating technologies from leading manufacturers in the automation industry, we achieved a successful automated design. This system is ideal for similar pick-and-place applications, effectively addressing safety concerns and managing the challenges of handling reflective parts. This integration showcases our commitment to innovation and operational efficiency.